Albedo의 첫 위성 Clarity-1이 VLEO에서 지속 가능한 운용과 중형 고성능 Precision 버스를 비행 실증했으며, 10cm급 가시영상 달성을 위한 핵심 기술의 98%를 검증한 과정과 교훈, 그리고 향후 계획을 정리한다.
2025년 3월 14일, Albedo의 첫 위성 Clarity-1이 SpaceX Transporter-13으로 발사되었습니다. 우리는 이 패스파인더에 큰 승부수를 던졌습니다. 미션 목표는 다음과 같았습니다.
우리는 엄청나게 많은 것을 증명했고, 엄청나게 많은 것을 배웠습니다.
첫 두 목표는 확실히 달성했고, 세 번째 목표에 필요한 기술의 **98%**를 검증했습니다. 이는 첫 위성으로서는 대단히 야심찬 도전이었습니다. 우리는 고성능 버스를 일정과 예산 내에 설계·제작했고, 대구경 망원경을 통합했으며, 어떤 상업 기업도 지속 운용을 해낸 적 없는 환경에서 운용했습니다. 그리고 이 모든 것은 전적으로 민간 자본으로 이루어졌습니다.
이 글은 그 전체 이야기입니다.
가장 중요한 결과부터 시작하겠습니다. VLEO는 됩니다. 그리고 우리가 예상한 것보다 더 잘 됩니다.
수십 년 동안 초저지구궤도는 일반적인 위성 수명으로는 비현실적이라고 여겨졌습니다. 대기가 더 두꺼워 저항이 커지고, 보통의 위성은 몇 주 만에 대기권 재진입으로 떨어져 나갔을 겁니다. 저항이 당신을 죽이지 않더라도, 원자 산소가 태양전지판과 표면을 침식했을 겁니다. VLEO에서 성공하려면 근본적으로 다른 위성 설계가 필요했습니다.
Clarity-1은 우리의 설계가 통한다는 것을 증명했습니다.
핵심 지표는 항력 계수였습니다. 설계 목표 대비 12% 더 좋게 나왔습니다. 고도 350~380km 구간에서 여러 차례 측정했고, 반복 가능(repeatable)한 결과를 얻었습니다. 이는 태양활동 주기를 평균했을 때 고도 275km에서 위성 수명이 5년이라는 우리의 모델을 검증합니다. 이는 가장 중요한 가정 중 하나였고, 우리는 이를 넘어섰습니다.
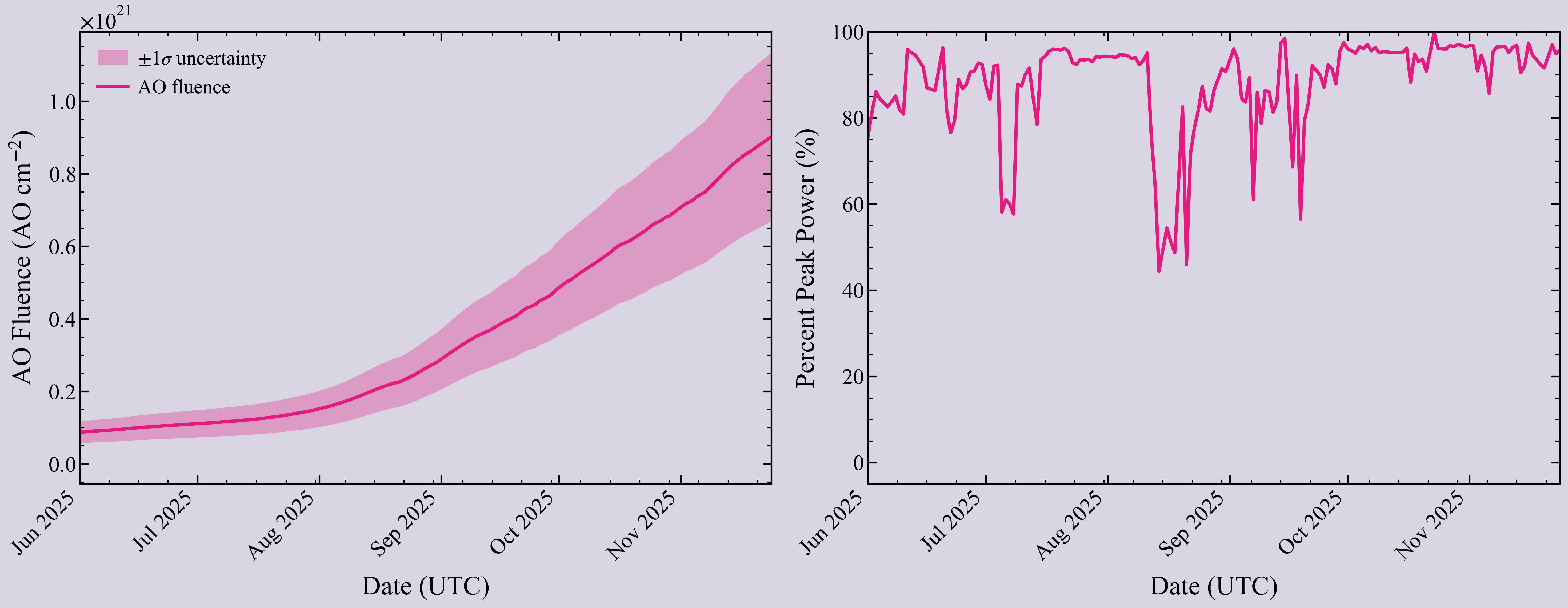
원자 산소(AO)는 VLEO의 ‘침묵의 살인자’입니다. 더 낮은 고도로 내려갈수록 더 많은 AO를 만나게 됩니다. AO는 태양전지판과 다른 전통적 위성 재료를 열화시킵니다. 우리는 AO 열화를 완화하기 위한 독특한 조치를 적용한 새로운 등급의 태양전지판을 개발했습니다. 효과가 있었습니다. 더 깊은 VLEO로 내려가 AO 플루언스가 로그 형태로 증가해도, 발전량은 일정하게 유지되었습니다. 태양전지판은 설계대로 버티고 있습니다.
Clarity-1은 100km가 넘는 제어 하강, VLEO에서의 정지궤도 유지(stationkeeping) 를 시연했고, 대기 밀도가 일시적으로 급증하는 태양 폭풍도 견뎌냈습니다 — Clarity의 하강률에 대한 영향은 거의 눈에 띄지 않았습니다. 모멘텀 관리가 작동했습니다. 고장 탐지가 작동했습니다. 추력 계획 모델은 GOCE 데이터(2009년 VLEO R&D 미션)와 비교해 미터 미만 정확도로 검증되었습니다. 방사선 내성도 훌륭해서, 단일 사건 업셋(SEU)이 예상보다 4배 적게 발생했습니다. 궤도 결정(orbit determination)은 제대로 ‘튜닝’되었습니다.
우리는 지속 가능한 VLEO 운용을 증명했습니다.
2년이 조금 넘는 기간에 사내에서 개발·제작한 우리의 버스 Precision은 이제 TRL-9입니다. 즉, 궤도상 비행 실증을 마쳤습니다.
버스의 모든 서브시스템이 작동했습니다. 우리가 개발한 모든 사내 기술이 성능을 보였습니다. CMG 조향 법칙(steering law), 운용 모드, 비행·지상 소프트웨어, 전자 보드, 그리고 새로운 열관리 시스템까지. 우리는 임베디드 소프트웨어 GNC 타이밍 데드라인을 만족했고, 자세 및 궤도 결정 추정기를 수렴시켰으며, 4π 스테라디안 명령·텔레메트리 안테나 커버리지를 확인했고, 발전량과 부하에 대한 실제 궤도상 데이터를 확보했습니다.
클라우드 네이티브 지상 시스템은 놀라웠습니다. 25개 지상국에 걸친 접촉(contact) 계획이 완전 자동화되었습니다. 미션 스케줄링은 15분마다 업데이트되어 새로운 태스킹과 최신 위성 상태 정보를 반영했고, 각 스케줄과 상태를 시각적으로 추적하면서 갱신된 온보드 명령 로드로 매끄럽게 전환했습니다. 원하는 궤도 궤적을 달성하기 위한 자동 추력 계획은 하루 30회+ 기동을 지원했습니다. 엔지니어들은 인터넷과 보안 VPN만 있으면 어디서든 위성을 추적하고 명령할 수 있었습니다.

우리는 궤도상에서 비행 소프트웨어 기능 업데이트를 14번 성공적으로 배포했고, 심지어 FPGA 업데이트도 1회 수행했습니다(매우 드문 일입니다). Clarity의 운용 기간 내내 지속적으로 개선할 수 있는 능력은 필수적이었습니다. 우리가 마주친 도전의 핵심 해결책은 대부분 비행 소프트웨어 업데이트가 포함되어 있었습니다. 궤도상 소프트웨어 업그레이드는 매우 까다롭지만, Clarity-1은 첫날부터 이 근본 역량을 중심으로 설계되었습니다.
미션 첫 한 달은 마법 같았습니다.
발사 1시간 후, 우리는 Clarity-1이 프리미엄 ‘케이크토퍼(caketopper)’ 슬롯에서 LEO로 분리되는 모습을 지켜보았고, 로켓에서 분리될 때 나일강이 내려다보이는 놀라운 장면을 보았습니다.
Your browser does not support the video tag.
첫 교신은 불과 3시간 뒤, 산악 표준시(MT) 오전 5시 11분에 이뤄졌습니다. 미션 컨트롤에서 두 번의 지상국 패스를 데이터 없이 보고, 세 번째 패스에서 모든 서브시스템 대시보드로 녹색의 건강한 텔레메트리가 쏟아져 들어오는 모습을 상상해 보세요. Clarity는 자율 부트업 시퀀스와 로켓 분리율 캡처를 완벽하게 수행했습니다. 완벽한 착지였습니다.
다음 이정표 — 그리고 우리 중 많은 이들이 가장 긴장했던 부분 — 는 자율 Protect Mode, 즉 VLEO 버전의 세이프 모드였습니다.
우리는 1주일을 예상했습니다.
우리는 발사 14시간 만에 해냈습니다.
그날 오후 6시 45분까지 Clarity는 Operational 모드로 전환했고, 시운전(commissioning) 준비를 마쳤습니다.
“말해야겠어요. 지난 16시간은 정말 믿기지 않았습니다. 어젯밤 교대 근무를 시작할 때는 데이터 한 비트라도 보길 바랐는데요. 누가 발사 14시간 만에 Protect에 들어갈 거라고 말했으면 믿지 못했을 겁니다.” — Albedo GNC 엔지니어
그 다음 날들은 체크박스가 초록색으로 바뀌는 연속이었습니다. 4-CMG 시운전 완료. 페이로드 전원 인가 및 체크아웃 검증. 가시/열 센서의 열평형 확인. 첫 궤도상 소프트웨어 업데이트도 완벽.
Clarity는 위성 조향을 위해 CMG(Control Moment Gyroscopes)를 사용하며, 더 흔한 반작용휠보다 더 높은 기동성을 제공합니다. 우리는 통신 지상 단말을 조준하는 데 사용하는 GroundTrack 같은 GNC 모드 검증으로 넘어갔습니다.
Your browser does not support the video tag. Clarity-1이 GroundTrack 모드로 지상국을 정확히 조준하는 모습; 시각화는 실제 텔레메트리 기반
그 다음은 영상 데이터 다운링크를 위한 고속 링크인 X-밴드 무전기 시운전이었습니다. 지상국 제공업체의 포인팅 모드에서 문제를 찾아 해결한 뒤, 800Mbps 링크가 매 패스마다 데이터를 쏟아냈습니다. 파형은 깨끗했고 교과서적이었습니다. 이는 우리가 가진 정밀 CMG 포인팅이 얼마나 제대로 잠겨(lock-in) 있었는지의 직접적인 증거였습니다.
이 정도 복잡도의 첫 위성으로는, 이렇게까지 매끄럽게 진행된 것이 믿기지 않을 정도였습니다. 수년간 개발해 온 새로운 기술들이 우리가 예상한 시운전 기간의 일부만에 검증되었습니다.
다음 단계는 LEO 분리 고도에서 VLEO로 내려가는 기동이었습니다. 망원경 오염 방지 커버를 안전하게 분리하고 사진을 찍기 시작할 수 있는 고도까지 말입니다.
그리고 4월 14일이 왔습니다.
4개의 CMG 중 하나에서 플라이휠 베어링 온도가 급상승했습니다. 우리의 고장 탐지·격리·복구(FDIR) 로직이 즉시 이를 감지했고, 스핀다운 후 자동 복구 동작을 수행했습니다. 그러나 다시 스핀업되지 않았습니다. 수동 복구도 시도했습니다. 역시 실패했습니다.
고장 메커니즘을 이해하지 못한 채 CMG 운용을 서두르면 미션 전체를 잃을 위험이 있었기에, 우리는 나머지 3개도 꺼 두고 자기 토크 로드(magnetic torque rods)를 사용해 2축 안정화 상태로 위성을 전환했습니다.
Your browser does not support the video tag. Clarity-1이 2축 안정화를 위해 의도적으로 회전하는 모습
선택지는 두 가지였습니다. 가능한 한 빨리 새로운 3-CMG 제어 알고리즘을 급히 만들어 다른 하나까지 잃을 위험을 감수할 것인지, 아니면 토크 로드만으로도 VLEO로의 하강 기동을 수행할 만큼 충분한 정확도의 3축 제어를 달성하는 방법을 찾아낼 것인지.
우리는 토크 로드를 선택했습니다.
이 크기(~600kg)의 위성에서 자기 토크 로드는 보통 자세 제어가 아니라 모멘텀 덤핑에 사용됩니다. 하지만 우리는 VLEO에서 더 큰 모멘텀 관리가 필요하다는 점 때문에 Clarity에 유난히 강력한 토크 로드를 탑재했습니다. 우리 GNC 팀은 토크 로드만으로 3축 자세 제어를 달성하는 알고리즘을 개발하는 데 집중했습니다.
한 달 안에, 작동하게 만들었습니다.
전기추력기 두 개는 빠르게 시운전되었고 상태도 좋았습니다. 하지만 토크 로드만 사용할 경우 자세 제어 오차는 15~20도였고, 때로는 약 45도까지 갔습니다. 그리고 VLEO로의 하강 기동은 단순히 “바람 쪽을 향해 쏜다”가 아닙니다. 궤도 전 구간에서 연속적인 벡터 및 궤적 관리를 해야 합니다. 그 정도 제어 오차는 비효율적인 연소와 훨씬 어려운 하강 계획을 의미했습니다.
하지만 하강이 진행되는 동안 팀은 학습하고 반복했습니다. 더 많은 반복과 비행 소프트웨어 업데이트를 통해, 여러 종류의 실시간 데이터를 반영한 온보드 로직을 업로드했고, 그 결과 추력 벡터 제어를 목표 대비 5도 이내로 맞추게 되었습니다. 우리가 구축한 자율 추력 계획 시스템 덕분에, 원래 예상했던 하강 속도에 거의 근접하는 성능을 되찾을 수 있었습니다.
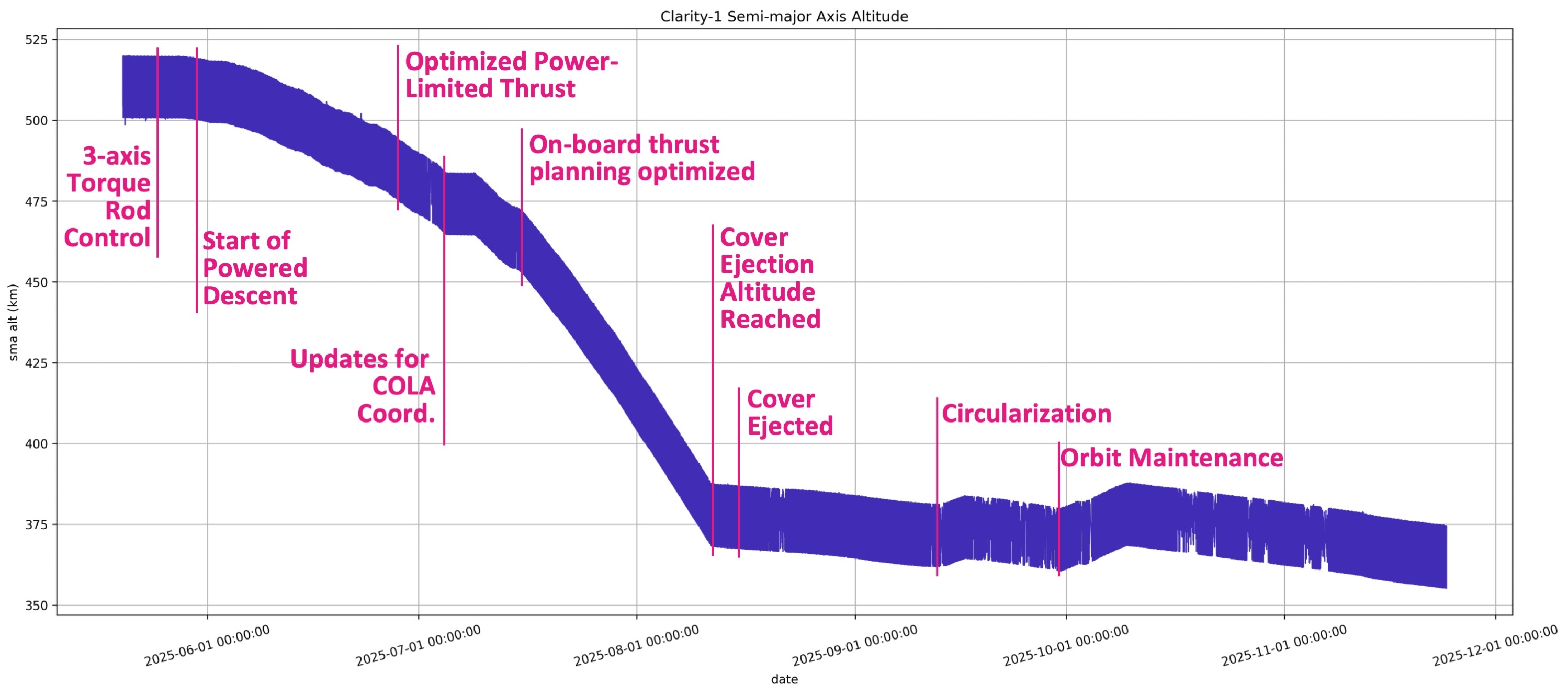
우리는 ISS를 안전하게 지나 VLEO에 진입했습니다. 오염 방지 커버를 떼어낼 순간이 왔습니다.
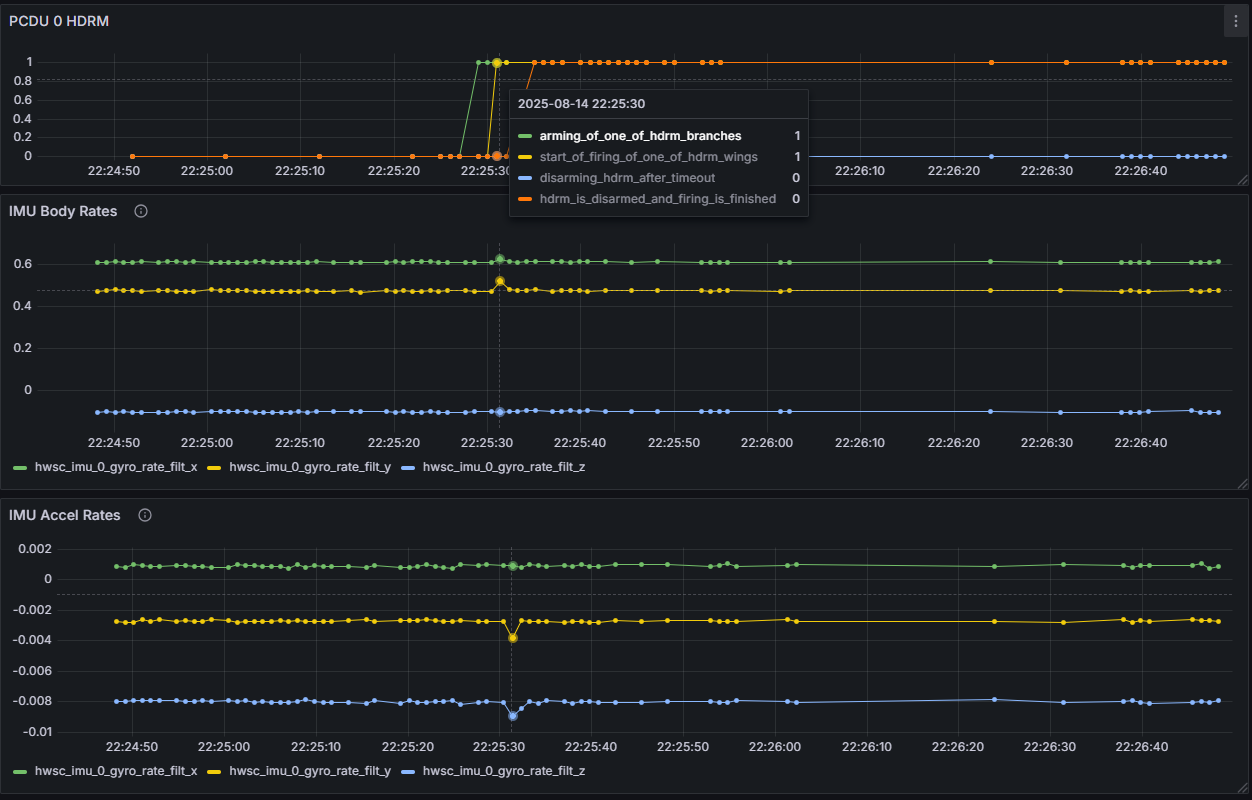
안전 고도에 도달하자, 망원경을 보호하던 오염 방지 커버를 분리할 시간이었습니다.
수개월간의 온도 변동 뒤에 커버가 붙어버리는 공포 이야기는 많습니다.
Clarity의 커버는 완벽했습니다. 텔레메트리에서 이 작은 ‘튀는’ 신호를 실시간으로 봤던 것을 절대 잊지 못할 겁니다. 뉴턴의 제3법칙을 통해 분리가 성공했음을 확인한 순간이었습니다. 직후 LeoLabs가 두 개의 분리된 물체를 추적했음을 확인해 주었습니다.
이제 촬영을 시작할 준비가 됐습니다.
여기서부터 복잡해집니다.
우리 GNC와 FSW(비행 소프트웨어) 팀은 새로운 3-CMG 제어 법칙을 거의 완성했지만 아직 끝내지는 못했습니다. CMG는 상업 우주에서 드물게 사용되며, 스타트업이 쓰는 경우는 더더욱 드뭅니다. 여기에 한 단계 더 나아가면, 우리가 알기로는 ‘정교 시스템’이 아닌 위성에서는 시도된 적 없는(그리고 확실히 궤도상에서 개발해 업로드한 적도 없는) 특이점(singularity) 취약 3-CMG 제어를 해야 했습니다. 전통 알고리즘은 특이점이 없는 능력 볼륨을 제공하기 위해 최소 4개의 CMG를 요구합니다.
우리는 조금이라도 진전을 내고 싶었기 때문에, 강한 제약이 있음에도 토크 로드로 촬영을 시작했습니다. 제약은 다음과 같았습니다: 50픽셀 이상의 스미어(smear), 지구 자기장으로 인한 토크 로드 제어의 흔들림으로 큰 조준 오차, 그리고 다운링크가 하루 최대 두 장의 작은 이미지로 제한. 뒤의 두 제약은, 소중한 다운링크 용량을 구름에 써버릴 위험이 있다는 뜻이었습니다.
예상대로 첫 이틀의 픽셀은 대부분 구름이었지만, 이 이미지에서 조금이나마 뚫고 보게 되어 기뻤습니다.
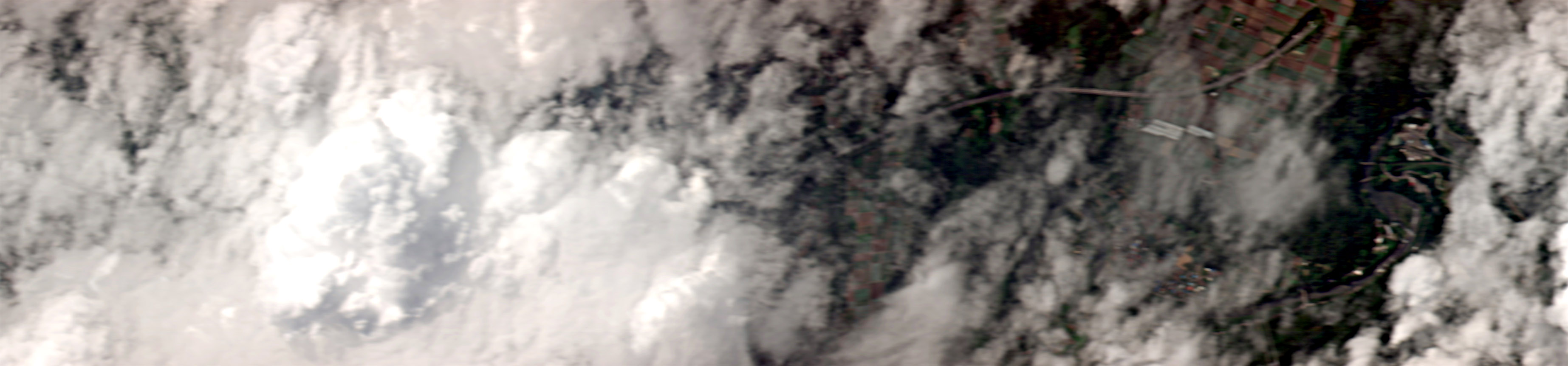
자세를 정확히 제어 하진 못했지만, 사후적으로 좋은 자세 지식(knowledge) 은 갖고 있었습니다. AyJay는 Claude Code로 각 촬영(collection)의 기상 조건을 Slack에 자동 게시하는 영리한 아이디어를 빠르게 만들었습니다. 우리는 이를 분석해 어떤 이미지가 맑을 가능성이 높은지 판단했고, 그 이미지를 골라 다운링크했습니다.
짜잔:
.jpg)
포커스 위치를 몇 차례 조정했고, 이미지는 계속 좋아졌습니다.

그리고 3-CMG 제어가 준비되었습니다.
새 알고리즘과 소프트웨어는 처음 적용한 순간부터 완벽히 작동했습니다.
아래 시각화는 Clarity가 제한된 3-CMG 기동성으로 연속 7회 촬영 기동을 수행한 뒤, 몇 분 후 아이슬란드 상공에서 X-밴드로 다운링크하는 실제 텔레메트리를 보여줍니다. 위성은 매우 낮은 제어 오차로 정교한 자세 프로파일을 실행했습니다. 광섬유 자이로(FOG) 측정은 탁월한 지터 성능을 보여주었습니다.
Your browser does not support the video tag. Clarity는 오프-나디르 촬영이 가능한 민첩한 TDI 라인 스캐너입니다. 이 시퀀스는 보정 목적상 의도적으로 나디르 근처에서 수행했습니다.
실시간으로, 그 7장의 이미지를 수집하고 다운링크하는 데 걸린 시간은 10분이었습니다.
그리고 여기서 우리의 지상 소프트웨어가 진가를 드러냈습니다. 대부분의 미션에서 “지상에 데이터가 도착”은 시작일 뿐이고, 원시 비트를 눈으로 볼 수 있는 형태로 만드는 과정은 느린 인수인계와 배치 처리의 연쇄입니다. 우리는 달랐습니다. 다운링크가 끝나고 몇 초 안에, 이미지 제품 파이프라인이 처리된 스니펫을 회사 Slack에 게시하고 있었습니다. 말 그대로 몇 초.
이 엔드투엔드 루프 — 궤도에서의 광자가 지상에서 볼 수 있는 제품이 되기까지 몇 분 — 는 업계에서도 여전히 드문 역량입니다.
예상대로 스미어가 줄면서, 이미지 품질은 즉시 개선되었습니다.


%20copy.jpg)




이제 포커스 보정(focus calibration)을 실행할 준비가 되었습니다.
대형 망원경 광학계는 궤도상 첫 몇 달 동안 흡습성 건조(hygroscopic dryout)를 겪습니다. 지상 조립 중 재료에 갇혀 있던 수분이 우주의 진공에서 서서히 빠져나가며, 그 결과 초점 위치가 드리프트합니다. 최적 초점을 맞추려면 수십 번의 반복이 필요합니다. 이미지를 촬영하고, 선명도를 분석하고, 초점 위치를 조정하고, 반복합니다. 매 사이클마다 시스템이 설계된 광학 성능에 더 가까워지며, 우리의 망원경은 지상 정렬이 사양대로 검증되어 있었습니다.
우리는 계속 반복했습니다.
.jpg)


몇 차례 반복한 후, 자동차가 보이기 시작했습니다.

참고: 모든 이미지는 미보정(uncalibrated)입니다.
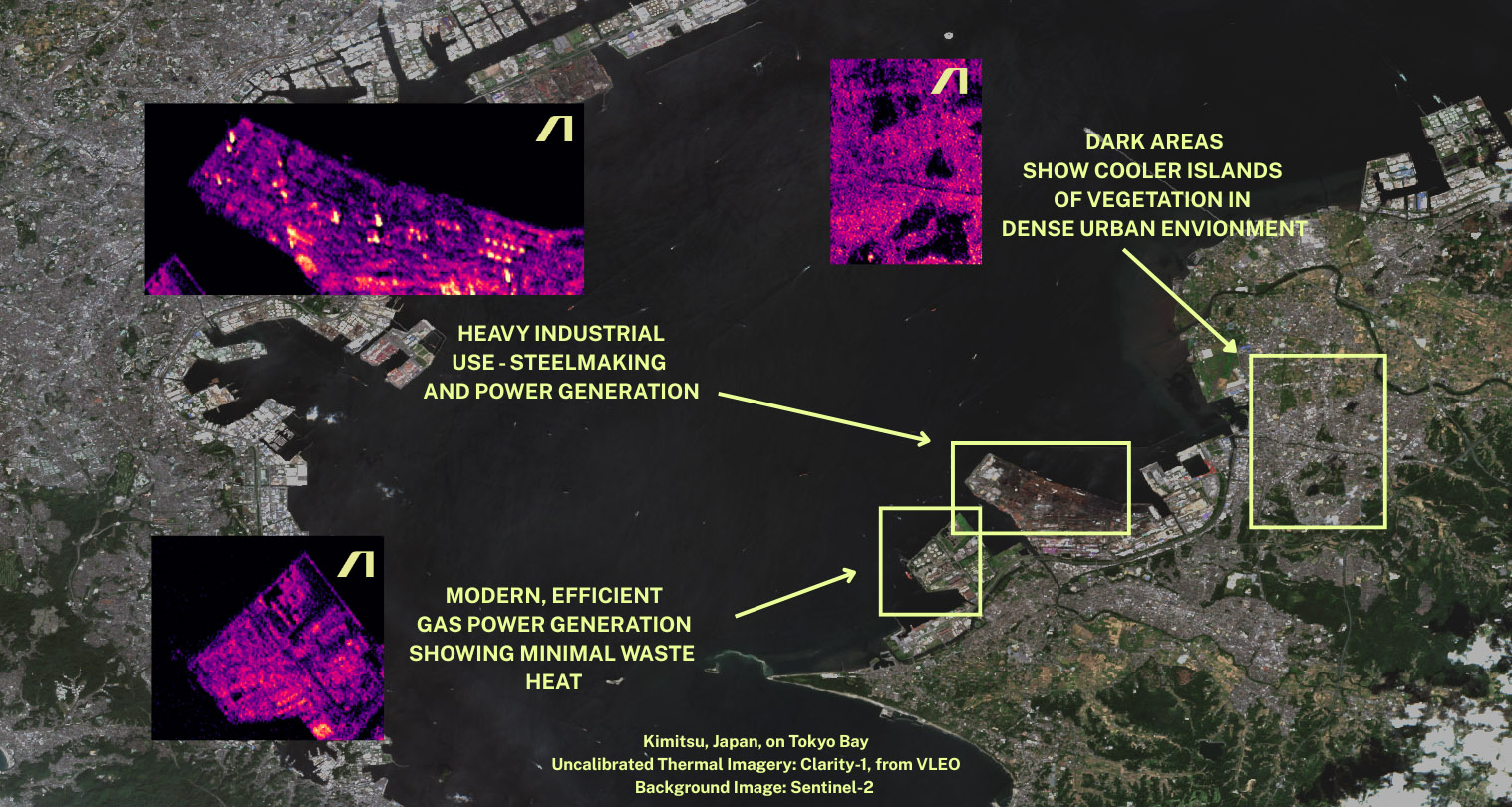
촬영 초기임에도 적외선 이미지는 우리를 놀라게 했습니다. 저비용 마이크로볼로미터(냉각형 IR 센서 가격의 일부)를 사용해, 도쿄만의 선박, 개별 코크스 오븐과 굴뚝을 구분할 수 있을 정도의 제철/가공 시설, 실제 식생과 인조 잔디 간의 뚜렷한 시그니처(위장 탐지의 좋은 대리 지표)를 포착했습니다. 낮이든 밤이든, 대낮처럼 선명했습니다.
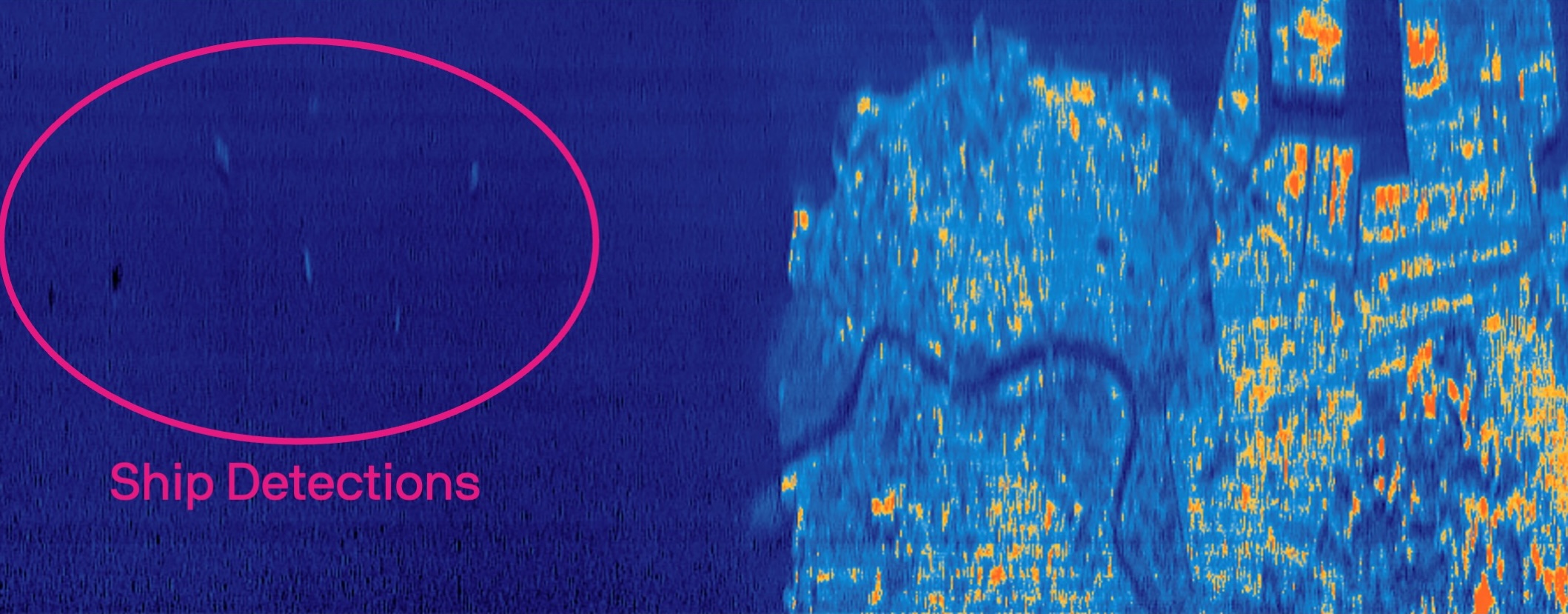
도쿄만
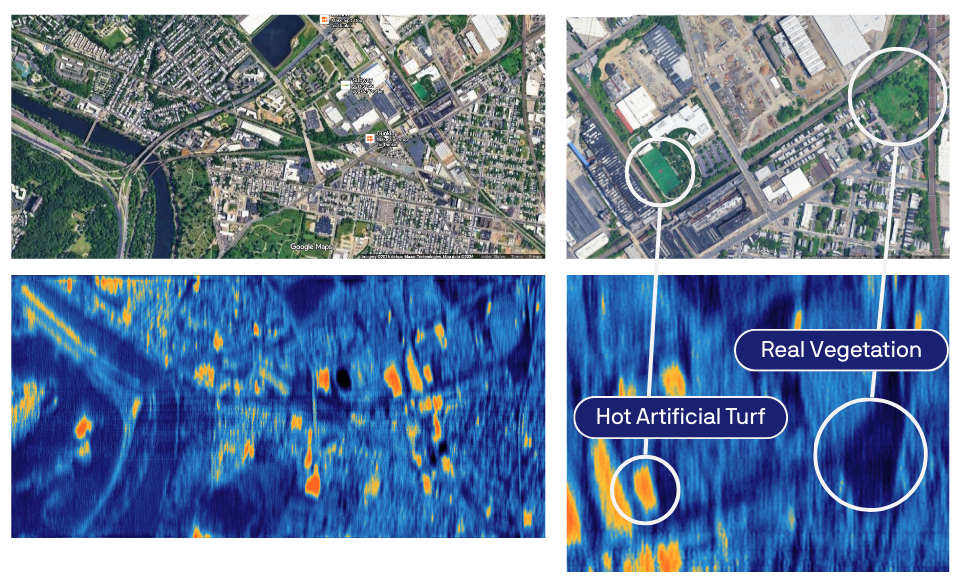
위장 탐지의 좋은 대리 지표
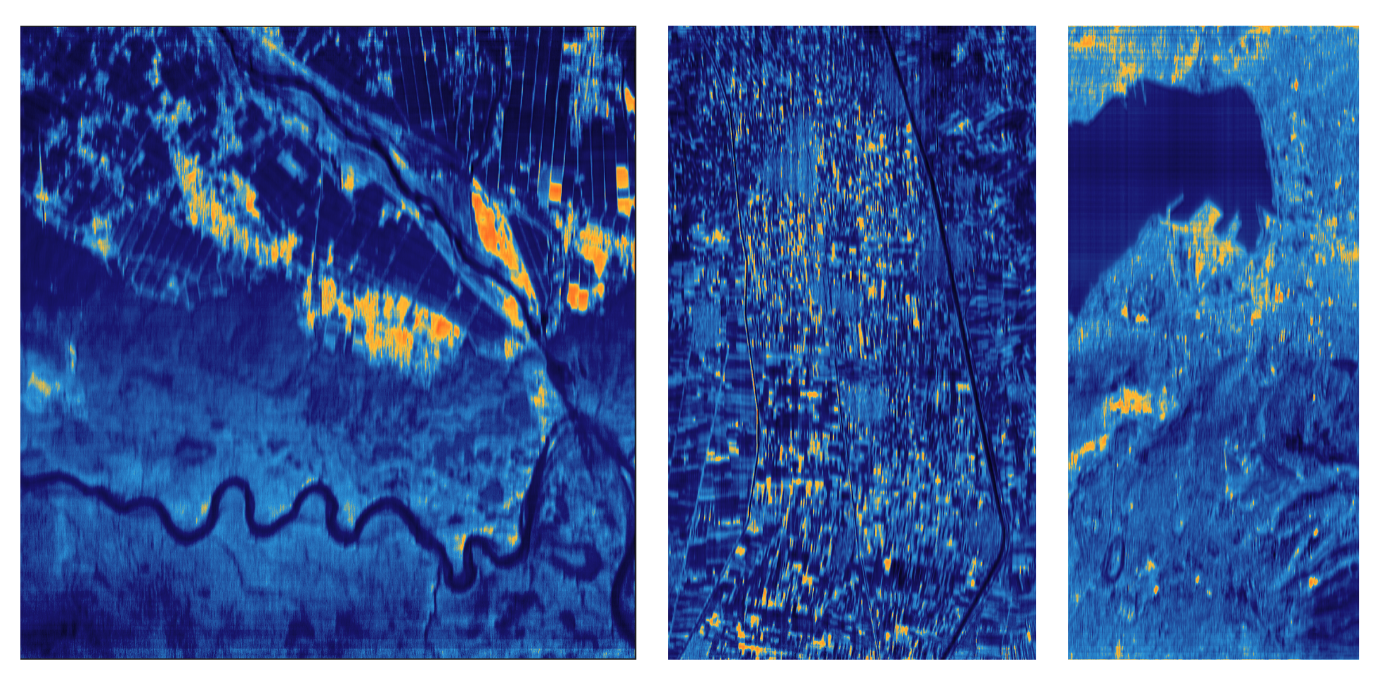
왼쪽에서 오른쪽: 일본 농촌, 이집트 농촌, 튀르키예(이즈미르) 도시 장면
흥분이 시작된 지 3일 후, CMG 문제가 다시 시작되었습니다.
두 번째 CMG가 우리가 경고 신호로 인지하게 된 것과 동일한 텔레메트리 시그니처를 보이기 시작했습니다.
조사로부터 배운 점은 다음과 같습니다. CMG의 허용 온도 사양은 실제 한계보다 훨씬 높게 설정되어 있었고, 그 실제 한계는 플라이휠 내부 윤활유가 감당할 수 있는 범위에 의해 제한된다는 점이었습니다. 미래에는 간단히 고칠 수 있는 문제였지만 — 뒤늦게 알게 된 불운한 코너 케이스였습니다.
문제를 보인 두 번째 CMG도 위성의 ‘뜨거운’ 쪽에 있었습니다. 추가 베어링 마모를 막기 위해 기체와 CMG 운용을 전면 개편했지만, 미션 첫 달에 이미 손상은 진행된 상태였습니다.
우리는 CMG를 지속 가능하게 운용하기 위해 몇 달 동안 가능한 모든 것을 시도했습니다. 팀은 여러 영리한 해법을 시도했고, 그중 하나는 잠겼던 첫 번째 CMG를 다시 살려내기도 했습니다. 운영자가 명령할 때 4개 중 임의의 3개 CMG를 선택할 수 있도록 기능도 업로드했습니다. 하지만 지속적이고 신뢰할 수 있는 운용을 확보하진 못했습니다.
CMG 문제에도 불구하고, 이미징 여정이 증명한 것은 다음과 같습니다.
전체 엔드투엔드 이미지 체인은 작동합니다. 광자가 광학계에 들어오고, 센서가 이를 포착하고, 페이로드 전자계에서 처리되며, 패킷화·암호화되어 X-밴드로 송신되고, 지상에서 수신되어 이미지 제품으로 처리됩니다. 이 전체 체인이 검증되었습니다.
엔드투엔드 루프는 빠릅니다. 다운링크 후 30초 이내에 처리된 이미지 스니펫이 회사 Slack에 게시되었습니다.
센서 성능은 기대를 넘었습니다. 다이내믹 레인지, 복사계(radiometry), 컬러 밸런스, 밴드 간 정렬 — 모두 미보정 이미지에서도 매우 좋습니다.
긴 스트립 이미지를 스캔할 수 있습니다. 라인 스캐닝 방식으로 20~30km 길이의 스트립을 설계대로 생성했습니다.
포인팅 정확도와 고품질 텔레메트리는 정밀 지오로케이션의 재료를 검증합니다. 각 픽셀이 지구 어디에 떨어지는지 <5m(폐루프 CE90)로 특정하기 위한 데이터가 확보되어 있습니다.
지터와 스미어가 낮습니다. 광섬유 자이로 측정으로 목표 대비 스미어는 3배 낮고 지터는 11배 낮음을 확인했습니다 — ‘정교한’ 이미지에 필수적인 요소입니다.
자사 이미지 스케줄러가 작동합니다. 촬영을 계획하고, 제약을 관리하고, 매일 무엇을 촬영할지 최적화하는 자동 시스템이 설계대로 동작했습니다.
미션 9개월째, 우리는 Clarity-1과의 연락이 끊겼습니다.
그 시점에 우리는 CMG에 대해 선택지를 대부분 소진한 상태였고, 이미지 품질을 더 끌어올릴 경로는 사실상 닫혔습니다.
미션 내내 TT&C(추적·원격측정·명령) 무전기의 간헐적 메모리 문제를 추적해 왔고, 문제 발생 시마다 우회해 왔습니다. 우리의 최선의 가설은, 그 문제 중 하나가 메모리를 손상시키는 방식으로 악화되어 재부팅을 막고 있다는 것입니다. 우리는 여러 복구 접근을 시도했습니다. 지금까지는 어느 것도 성공하지 못했고, 현 시점에서 복구 가능성은 낮아 보입니다.
하지만 중요한 점은 이것입니다. 우리가 수집한 VLEO 검증 데이터는 충분합니다.
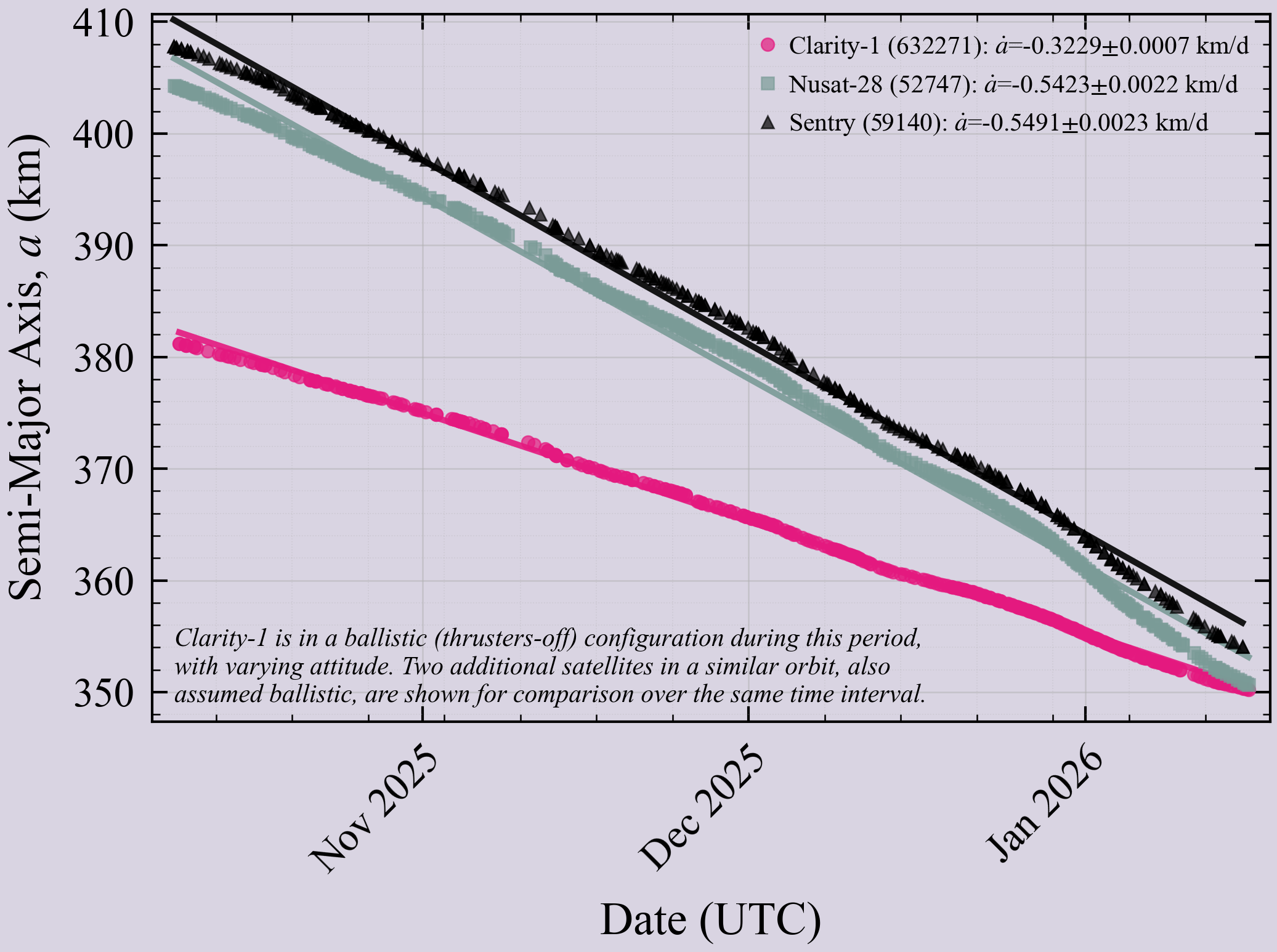
우리는 최신 대기 밀도 모델, 고정밀 궤도역학 힘 모델, 그리고 350~380km 고도에서 수개월간의 자연 궤도 붕괴 데이터를 결합해 Clarity의 항력 계수를 산출했습니다 — 서로 다른 고도에서 반복 가능한 결과를 얻었습니다. 이 항력 계수와, 고효율 추력기로 VLEO에서 수개월 동안 고도를 유지할 수 있음을 입증한 결과는, VLEO 영역 전반에서 공기역학적 항력 하에서 기체가 어떻게 거동하는지를 정확히 알려주며, 태양활동 주기를 평균했을 때 275km에서 평균 5년 수명을 검증합니다. 태양전지판 텔레메트리와 온보드 원자 산소 센서 데이터는 VLEO 수준의 AO 플루언스 노출 이후에도 최대 발전량이 일정하게 유지되었음을 보여주며, 우리의 AO 완화가 작동했음을 증명합니다.
LeoLabs의 도움 덕분에, Clarity가 자율적으로 자세를 유지하고 있음을 검증했습니다. 그녀는 여전히 거기 있고, 여전히 정렬된 채로, 여전히 VLEO를 따라 내려오고 있습니다. 다만 우리와 대화하지 않을 뿐입니다.
이 일이 있기 전부터 우리는 향후 시스템을 위해, 제3자에서 조달한 이 무전기를 재사용하는 대신 사내 TT&C 무전기를 개발하기 시작했습니다. 우리는 이번 신뢰성 이슈의 교훈을 그 개발에 반영할 것입니다.
우리는 여전히 문제를 해결 중입니다. 이 장은 아직 끝나지 않았습니다. 하지만 설령 그렇다 하더라도, Clarity-1은 우리가 다음을 만들기 위해 필요한 것을 주었습니다.
‘정교한’ 영상(exquisite imagery)을 피라미드로 생각하면, 정점인 10cm 가시영상을 달성하려면 시스템이 100% 함께 작동해야 합니다. 우리는 약 **98%**까지 왔습니다. 피라미드의 나머지 모든 것 — 전체 기반 — 은 증명되어 리스크가 제거되었습니다.
우리의 항력 계수. 원자 산소 내성. 태양전지판. 열관리. 비행 소프트웨어. 지상 소프트웨어. CMG 조향 법칙. 정밀 포인팅 알고리즘. 페이로드 전자계. 센서 성능. 이미지 처리 체인. VLEO에서의 지속 운용 능력. 우리 팀.
모두 검증되었습니다.
무엇을 고쳐야 하는지도 정확히 알고 있습니다. 단순합니다. CMG를 더 낮은 온도에서 운용하면 됩니다. 시스템 열 설계는 다음 제작(build)에서 CMG 수명을 최대화하도록 이미 업데이트되었습니다.
CMG 외에도, 주변적인 교훈이 몇 가지 있었습니다. 보조 거울 구조는 더 강성이 높을 수 있다는 것을 배웠고 — 업데이트된 설계에 이미 반영했습니다. 페이로드 일부 영역에는 더 많은 히터 용량을 쓸 수 있다는 것도 배웠고 — 역시 이미 수정했습니다.
작동했던 것에서도 배웠습니다. 우리는 차세대 비행 소프트웨어, 항전장비, 전력 분배의 개발 경로를 이미 상당히 진행했습니다. 궤도 결정과 지오로케이션은 더 좋아질 것입니다. 추가 표면 처리로 항력 계수는 더 개선될 것입니다. AO 내성은 검증된 수준을 유지하면서 발전량은 증가할 것입니다. 목록은 계속됩니다.
정교한 영상으로 가는 길은 분명합니다. 그리고 이는 VLEO에서의 지속 운용이 열어젖히는 많은 흥미로운 능력 중 하나일 뿐입니다.
우리의 다음 VLEO 미션은 이번 교훈을 반영하고, 이미징을 넘어서는 미션을 가능하게 하는 새로운 기능들을 시연할 것입니다 — 곧 더 많은 세부 내용을 공유하겠습니다. 동시에 이미징은 핵심 초점으로 남습니다. 우리는 더 넓은 VLEO 로드맵의 일부로 EO/IR 미션을 위한 광학 페이로드를 계속 구축하고 있습니다.
Clarity-1의 성공은 우리의 핵심 신념을 강화했습니다. VLEO는 단지 이미징에 더 좋은 궤도가 아니라 — 다음 생산적인 궤도 층입니다.
물리 법칙은 가차 없지만, 바로 그래서 중요합니다. 더 낮게 내려가면 성능이 단계적으로 도약합니다. 더 선명한 센싱, 더 빠른 링크, 더 낮은 지연, 더 높은 즉응성. VLEO가 수십 년간 외면받아 온 이유는 장점이 없어서가 아니라, 대부분의 위성이 충분히 오래 생존하지 못했기 때문입니다.
이제 우리는 그들이 생존할 수 있다는 것을 압니다.
Clarity는 어려운 부분을 증명했습니다. 지속 가능한 VLEO 운용, 검증된 항력 및 수명 모델, 원자 산소 내성, 그리고 비행 실증된 고성능 버스. 우리는 VLEO에 대해 추측하는 것이 아닙니다. 우리는 그 안에서 운용하고, 그 안에서 배우고, 확장할 자본을 확보했습니다.
계속 전진합니다.
Topher & Team Albedo